|
Система тел и пружин
|
||||||
|
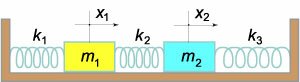
Система тел, соединенных между собой пружинами, является классической системой с несколькими степенями свободы. Так, например, система двух тел с тремя пружинами имеет две степени свободы. Это означает, что ее конфигурацию можно описать двумя обобщенными координатами, в качестве которых удобно взять смещения первого и второго тела от положения равновесия.
Движение связанных тел описывается системой двух дифференциальных уравнений \(2\)-го порядка. В простейшем случае можно пренебречь силами трения и сопротивления воздуха и учитывать лишь силы упругости, которые подчиняются закону Гука. Оказывается, даже такая упрощенная система обладает нетривиальными динамическими свойствами. В целом, характер ее движения определяется двумя собственными частотами, которые зависят от параметров системы (т.е. от масс тел и коэффициентов жесткости пружин). Кроме того, движение тел существенно зависит от начальных условий. Влияние этих факторов можно изучить с помощью представленной ниже анимации. Данная система схематически изображена на рисунке \(1.\) Она состоит из двух тел, массы которых равны \({m_1}\) и \({m_2},\) и трех пружин с коэффициентами жесткости \({k_1},\) \({k_2},\) \({k_3}.\) Смещение тел от положений равновесия определяется координатами \({x_1}\) и \({x_2}.\)
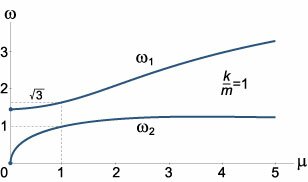
Подставляя пробные функции \({x_1}\left( t \right),\) \({x_2}\left( t \right)\) в матричное уравнение, получаем характеристическое уравнение для определения собственных частот колебаний: \[ {\det \left( {K + {\omega ^2}I} \right) = 0,}\;\; {\Rightarrow \left| {\begin{array}{*{20}{c}} { - \frac{{{k_1} + {k_2}}}{{{m_1}}} + {\omega ^2}}&{\frac{{{k_2}}}{{{m_1}}}}\\ {\frac{{{k_2}}}{{{m_2}}}}&{ - \frac{{{k_2} + {k_3}}}{{{m_2}}} + {\omega ^2}} \end{array}} \right| = 0,}\;\; {\Rightarrow \left( {{\omega ^2} - \frac{{{k_1} + {k_2}}}{{{m_1}}}} \right)\left( {{\omega ^2} - \frac{{{k_2} + {k_3}}}{{{m_2}}}} \right) - \frac{{k_2^2}}{{{m_1}{m_2}}} = 0,}\;\; {\Rightarrow {\omega ^4} - \frac{{{k_1} + {k_2}}}{{{m_1}}}{\omega ^2} - \frac{{{k_2} + {k_3}}}{{{m_2}}}{\omega ^2} } + {\frac{{\left( {{k_1} + {k_2}} \right)\left( {{k_2} + {k_3}} \right)}}{{{m_1}{m_2}}} - \frac{{k_2^2}}{{{m_1}{m_2}}} = 0,}\;\; {\Rightarrow {\omega ^4} - \left( {\frac{{{k_1} + {k_2}}}{{{m_1}}} + \frac{{{k_2} + {k_3}}}{{{m_2}}}} \right){\omega ^2} } + {\frac{{\left( {{k_1} + {k_2}} \right)\left( {{k_2} + {k_3}} \right)}}{{{m_1}{m_2}}} - \frac{{k_2^2}}{{{m_1}{m_2}}} = 0.} \] Решая это биквадратное уравнение, находим собственные частоты колебаний. Вычислим сначала дискриминант: \[ {D = {\left( {\frac{{{k_1} + {k_2}}}{{{m_1}}} + \frac{{{k_2} + {k_3}}}{{{m_2}}}} \right)^2} } - {4\left[ {\frac{{\left( {{k_1} + {k_2}} \right)\left( {{k_2} + {k_3}} \right)}}{{{m_1}{m_2}}} - \frac{{k_2^2}}{{{m_1}{m_2}}}} \right] } = {{\left( {\frac{{{k_1} + {k_2}}}{{{m_1}}}} \right)^2} + {\left( {\frac{{{k_2} + {k_3}}}{{{m_2}}}} \right)^2} } + {\frac{{2\left( {{k_1} + {k_2}} \right)\left( {{k_2} + {k_3}} \right)}}{{{m_1}{m_2}}} } - {\frac{{4\left( {{k_1} + {k_2}} \right)\left( {{k_2} + {k_3}} \right)}}{{{m_1}{m_2}}} } + {\frac{{4k_2^2}}{{{m_1}{m_2}}} } = {{\left( {\frac{{{k_1} + {k_2}}}{{{m_1}}} - \frac{{{k_2} + {k_3}}}{{{m_2}}}} \right)^2} } + {\frac{{4k_2^2}}{{{m_1}{m_2}}}.} \] Тогда квадраты собственных частот будут описываться формулой \[ {{\omega ^2} } = {\frac{1}{2}\left[ {\left( {\frac{{{k_1} + {k_2}}}{{{m_1}}} + \frac{{{k_2} + {k_3}}}{{{m_2}}}} \right) \pm \sqrt {{{\left( {\frac{{{k_1} + {k_2}}}{{{m_1}}} - \frac{{{k_2} + {k_3}}}{{{m_2}}}} \right)}^2} + \frac{{4k_2^2}}{{{m_1}{m_2}}}} } \right].} \] Далее, чтобы избежать громоздких формул, рассмотрим более простой случай, когда жесткость всех пружин одинакова: \({k_1} = {k_2} = {k_3} = k.\) Кроме того, введем отношение масс тел: \(\mu = \large\frac{{{m_2}}}{{{m_1}}}\normalsize.\) Тогда формула для квадрата частот колебаний принимает такой вид: \[ {{\omega ^2} } = {\frac{1}{2}\left[ {\left( {\frac{{2k}}{{{m_1}}} + \frac{{2k}}{{{m_2}}}} \right) \pm \sqrt {{{\left( {\frac{{2k}}{{{m_1}}} - \frac{{2k}}{{{m_2}}}} \right)}^2} + \frac{{4{k^2}}}{{{m_1}{m_2}}}} } \right] } = {k\left[ {\left( {\frac{1}{{{m_1}}} + \frac{1}{{{m_2}}}} \right) \pm \sqrt {{{\left( {\frac{1}{{{m_1}}} - \frac{1}{{{m_2}}}} \right)}^2} + \frac{1}{{{m_1}{m_2}}}} } \right],}\;\; {\Rightarrow {\omega ^2}{m_2} = k\left[ {\left( {\frac{{{m_2}}}{{{m_1}}} + \frac{{{m_2}}}{{{m_2}}}} \right) \pm \sqrt {{{\left( {\frac{{{m_2}}}{{{m_1}}} - \frac{{{m_2}}}{{{m_2}}}} \right)}^2} + \frac{{m_2^2}}{{{m_1}{m_2}}}} } \right] } = {k\left[ {\mu + 1 \pm \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right],}\;\; {\Rightarrow {\omega ^2} = \frac{k}{{{m_2}}}\left[ {\mu + 1 \pm \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right].} \] Полученное соотношение описывает \(2\) собственных частоты: \({\omega _1}\) (со знаком "плюс") и \({\omega _2}\) (со знаком "минус"). Зависимости частот \({\omega _1},\) \({\omega _2}\) от отношения масс \(\mu\) показаны на рисунке \(2.\) В случае равных масс \(\left( {\mu = 1} \right)\) собственные частоты колебаний будут описываться следующими компактными формулами: \[{\omega _1} = \sqrt {\frac{{3k}}{m}} ,\;\;{\omega _2} = \sqrt {\frac{k}{m}} .\] Заметим, что частоты \({\omega _1},\) \({\omega _2}\) всегда являются действительными числами. Это следует из общих физических соображений. Действительно, при мнимой частоте возникла бы утечка энергии, что противоречило бы условию сохранения энергии в системе. Данный факт, однако, можно установить и чисто математическим путем. В самом деле, вопрос возникает лишь для частоты \({\omega _2}.\) Условие неотрицательности для \(\omega _2^2\) выглядит так: \[ {\omega _2^2 > 0,}\;\; {\Rightarrow \mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } > 0,}\;\; {\Rightarrow \mu + 1 > \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } .} \] Здесь левая часть неравенства и выражение под корнем в правой части всегда положительны. После возведения обеих частей неравенства в квадрат получаем: \[\require{cancel} {{\left( {\mu + 1} \right)^2} > {\left( {\mu - 1} \right)^2} + \mu ,}\;\; {\Rightarrow \cancel{\mu ^2} + 2\mu + \cancel{1} > \cancel{\mu ^2} - 2\mu + \cancel{1} + \mu ,}\;\; {\Rightarrow 3\mu > 0,}\;\; {\Rightarrow \mu > 0,} \] что всегда выполняется. Найдем собственный вектор \({\mathbf{H}_1} = {\left( {{H_{11}},{H_{21}}} \right)^T}\) (верхний индекс \(^T\) обозначает операцию транспонирования), соответствующий частоте \({\omega _1}.\) Он определяется из матрично-векторного уравнения \[\left( {K + \omega _1^2I} \right){\mathbf{H}_1} = \mathbf{0}.\] Следовательно, \[ {\left( {\begin{array}{*{20}{c}} { - \frac{{2k}}{{{m_1}}} + \frac{k}{{{m_2}}}\left[ {\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]}&{\frac{k}{{{m_1}}}}\\ {\frac{k}{{{m_2}}}}&{ - \frac{{2k}}{{{m_1}}} + \frac{k}{{{m_2}}}\left[ {\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{H_{11}}}\\ {{H_{21}}} \end{array}} \right) = \mathbf{0},}\;\; {\Rightarrow \left\{ {\begin{array}{*{20}{l}} {\left( { - \frac{2}{{{m_1}}} + \frac{1}{{{m_2}}}\left[ {\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \right){H_{11}} + \frac{1}{{{m_1}}}{H_{21}} = 0}\\ {\frac{1}{{{m_2}}}{H_{11}} + \left( { - \frac{2}{{{m_1}}} + \frac{1}{{{m_2}}}\left[ {\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \right){H_{21}} = 0} \end{array}} \right..} \] В последней системе оба уравнения являются линейно зависимыми (поскольку определитель матрицы \(K\) равен нулю при \({\omega ^2} = \omega _1^2\)). Поэтому, координаты собственного вектора \({\mathbf{H}_1}\) можно выразить, например, из первого уравнения. Пусть \({H_{11}} = 1.\) Тогда \[ {{H_{21}} = {m_1}\left( {\frac{2}{{{m_1}}} - \frac{1}{{{m_2}}}\left[ {\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \right) } = {2 - \frac{1}{\mu }\left[ {\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right] } = {1 - \frac{{1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu } } = {\frac{{\mu - 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu }.} \] Таким образом, вектор \({\mathbf{H}_1}\) имеет следующие координаты: \[{\mathbf{H}_1} = \left( {\begin{array}{*{20}{c}} {{H_{11}}}\\ {{H_{21}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 1\\ {\frac{{\mu - 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu }} \end{array}} \right).\] Аналогично можно определить собственный вектор \({\mathbf{H}_2} = {\left( {{H_{12}},{H_{22}}} \right)^T},\) соответствующий частоте \({\omega _2}.\) В этом случае для \({\mathbf{H}_2}\) имеем уравнение \[\left( {K + \omega _2^2 I} \right){\mathbf{H}_2} = \mathbf{0}.\] В развернутом виде оно записывается как \[ {\left( {\begin{array}{*{20}{c}} { - \frac{{2k}}{{{m_1}}} + \frac{k}{{{m_2}}}\left[ {\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]}&{\frac{k}{{{m_1}}}}\\ {\frac{k}{{{m_2}}}}&{ - \frac{{2k}}{{{m_1}}} + \frac{k}{{{m_2}}}\left[ {\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{H_{12}}}\\ {{H_{22}}} \end{array}} \right) = \mathbf{0},}\;\; {\Rightarrow \left\{ {\begin{array}{*{20}{l}} {\left( { - \frac{2}{{{m_1}}} + \frac{1}{{{m_2}}}\left[ {\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \right){H_{12}} + \frac{1}{{{m_1}}}{H_{22}} = 0}\\ {\frac{1}{{{m_2}}}{H_{12}} + \left( { - \frac{2}{{{m_1}}} + \frac{1}{{{m_2}}}\left[ {\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \right){H_{22}} = 0} \end{array}} \right..} \] Полагая \({H_{12}} = 1,\) из первого уравнения найдем координату \({H_{22}}:\) \[ {{H_{22}} = {m_1}\left( {\frac{2}{{{m_1}}} - \frac{1}{{{m_2}}}\left[ {\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]} \right) } = {2 - \frac{1}{\mu }\left[ {\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right] } = {1 - \frac{{1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu } } = {\frac{{\mu - 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu }.} \] Следовательно, \[{\mathbf{H}_2} = \left( {\begin{array}{*{20}{c}} {{H_{12}}}\\ {{H_{22}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 1\\ {\frac{{\mu - 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu }} \end{array}} \right).\] После того, как собственные частоты \({\omega _1},{\omega _2}\) и собственные векторы \({\mathbf{H}_1},\) \({\mathbf{H}_2}\) найдены, можно записать общее решение системы. Учтем, что каждый из собственных векторов соответствует квадрату собственной частоты, т.е. двум значениям частот с противоположными знаками. Вектору \({\mathbf{H}_1}\) соответствуют две частоты \(\pm{\omega _1},\) а вектору \({\mathbf{H}_2}\) − частоты \(\pm{\omega _2}.\) В результате общее комплексное решение представляется в виде суммы четырех слагаемых: \[ {\mathbf{X}\left( t \right) = \left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)}\\ {{x_2}\left( t \right)} \end{array}} \right) } = {{C_1}{e^{i{\omega _1}t}}{\mathbf{H}_1} + {C_2}{e^{ - i{\omega _1}t}}{\mathbf{H}_1} } + {{C_3}{e^{i{\omega _2}t}}{\mathbf{H}_2} + {C_4}{e^{ - i{\omega _2}t}}{\mathbf{H}_2},} \] где \({C_1}, \ldots ,{C_4}\) − постоянные (в данном случае комплексные) числа. Пусть данные числа записываются в виде \[ {{C_1} = {\alpha _1} + i{\beta _1},\;\;{C_2} = {\alpha _2} + i{\beta _2},}\;\; {{C_3} = {\alpha _3} + i{\beta _3},}\;\; {{C_4} = {\alpha _4} + i{\beta _4}.} \] Чтобы величины \({x_1}\left( t \right),{x_2}\left( t \right)\) оставались действительными при любом значении \(t,\) необходимо, чтобы выполнялись соотношения \[ {{C_1} = {\bar C_2},\;\; \Rightarrow {\alpha _1} + i{\beta _1} = {\alpha _2} - i{\beta _2},}\;\; {\Rightarrow \left\{ {\begin{array}{*{20}{l}} {{\alpha _1} = {\alpha _2}}\\ {{\beta _1} = - {\beta _2}} \end{array}} \right.,} \] \[ {{C_3} = {{\bar C}_4},\;\; \Rightarrow {\alpha _3} + i{\beta _3} = {\alpha _4} - i{\beta _4},}\;\; {\Rightarrow \left\{ {\begin{array}{*{20}{l}} {{\alpha _3} = {\alpha _4}}\\ {{\beta _3} = - {\beta _4}} \end{array}} \right..} \] Тогда мнимые части общего решения будут сокращаться. Действительно, \[ {\mathbf{X}\left( t \right) = \left( {{\alpha _1} + i{\beta _1}} \right){e^{i{\omega _1}t}}{\mathbf{H}_1} } + {\left( {{\alpha _2} + i{\beta _2}} \right){e^{ - i{\omega _1}t}}{\mathbf{H}_1} } + {\left( {{\alpha _3} + i{\beta _3}} \right){e^{i{\omega _2}t}}{\mathbf{H}_2} } + {\left( {{\alpha _4} + i{\beta _4}} \right){e^{ - i{\omega _2}t}}{\mathbf{H}_2} } = {{\alpha _1}\left( {{e^{i{\omega _1}t}} + {e^{ - i{\omega _1}t}}} \right){\mathbf{H}_1} } + {i{\beta _1}\left( {{e^{i{\omega _1}t}} - {e^{ - i{\omega _1}t}}} \right){\mathbf{H}_1} } + {{\alpha _3}\left( {{e^{i{\omega _2}t}} + {e^{ - i{\omega _2}t}}} \right){\mathbf{H}_2} } + {i{\beta _3}\left( {{e^{i{\omega _2}t}} - {e^{ - i{\omega _2}t}}} \right){\mathbf{H}_2}.} \] Выражения в квадратных скобках можно упростить по формуле Эйлера: \[ {{e^{i\omega t}} + {e^{ - i\omega t}} } = {\cos \left( {\omega t} \right) + \cancel{i\sin \left( {\omega t} \right)} } + {\cos \left( { - \omega t} \right) + \cancel{i\sin \left( { - \omega t} \right)} } = {2\cos \left( {\omega t} \right),} \] \[ {{e^{i\omega t}} - {e^{ - i\omega t}} } = {\cancel{\cos \left( {\omega t} \right)} + i\sin \left( {\omega t} \right) } - {\cancel{\cos \left( { - \omega t} \right)} - i\sin \left( { - \omega t} \right) } = {2i\sin \left( {\omega t} \right).} \] Следовательно, \[ {\mathbf{X}\left( t \right) = 2\left[ {{\alpha _1}\cos \left( {{\omega _1}t} \right) - {\beta _1}\sin\left( {{\omega _1}t} \right)} \right]{\mathbf{H}_1} } + {2\left[ {{\alpha _3}\cos \left( {{\omega _2}t} \right) - {\beta _3}\sin\left( {{\omega _2}t} \right)} \right]{\mathbf{H}_2}.} \] Далее удобно ввести фазовые углы \({\varphi _1},{\varphi _2}\) и воспользоваться тригонометрической формулой \[\cos \left( {\omega t + \varphi } \right) = \cos \omega t\cos \varphi - \sin \omega t\sin \varphi .\] В результате общее решение будет записываться в следующем виде: \[ {\mathbf{X}\left( t \right) = \left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)}\\ {{x_2}\left( t \right)} \end{array}} \right) } = {{A_1}\cos \left( {{\omega _1}t + {\varphi _1}} \right){\mathbf{H}_1} } + {{A_2}\cos \left( {{\omega _2}t + {\varphi _2}} \right){\mathbf{H}_2},} \] где действительные постоянные \({A_1},\) \({A_2},\) \({\varphi _1},\) \({\varphi _2}\) зависят от начальных смещений и начальных скоростей тел, а собственные частоты \({\omega_1},\) \({\omega_2}\) и собственные векторы \({\mathbf{H}_1},\) \({\mathbf{H}_2}\) определяются соотношениями \[{\omega _{1,2}} = \sqrt {\frac{k}{{{m_2}}}} {\left[ {\mu + 1 \pm \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } } \right]^{\large\frac{1}{2}\normalsize}},\] \[ {{\mathbf{H}_1} = \left( {\begin{array}{*{20}{c}} {{H_{11}}}\\ {{H_{21}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 1\\ {\frac{{\mu + 1 - \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu }} \end{array}} \right),}\;\;\; {{\mathbf{H}_2} = \left( {\begin{array}{*{20}{c}} {{H_{12}}}\\ {{H_{22}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 1\\ {\frac{{\mu + 1 + \sqrt {{{\left( {\mu - 1} \right)}^2} + \mu } }}{\mu }} \end{array}} \right).} \] Закон изменения скоростей тел находится путем дифференцирования общего решения: \[ {\mathbf{\dot X}\left( t \right) = \left( {\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right)}\\ {{{\dot x}_2}\left( t \right)} \end{array}} \right) } = { - {A_1}{\omega _1}\sin \left( {{\omega _1}t + {\varphi _1}} \right){\mathbf{H}_1} } - {{A_2}{\omega _2}\sin\left( {{\omega _2}t + {\varphi _2}} \right){\mathbf{H}_2}.} \] Отсюда видно, что если в начальный момент \(t = 0\) скорости тел равны нулю, то фазовые углы \({\varphi _1},\) \({\varphi _2}\) также равны нулю. Далее будем рассматривать именно такой случай. Общее решение представляет собой сумму двух гармоник с частотами \({\omega_1},\) \({\omega_2}:\) \[ {\mathbf{X}\left( t \right) = \left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)}\\ {{x_2}\left( t \right)} \end{array}} \right) } = {{A_1}\cos \left( {{\omega _1}t} \right){\mathbf{H}_1} + {A_2}\cos \left( {{\omega _2}t} \right){\mathbf{H}_2}.} \] Вычислим постоянные \({A_1},\) \({A_2}\) в зависимости от начальных смещений. Пусть \[\mathbf{X}\left( 0 \right) = \left( {\begin{array}{*{20}{c}} {{x_1}\left( 0 \right)}\\ {{x_2}\left( 0 \right)} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} {{x_{10}}}\\ {{x_{20}}} \end{array}} \right).\] Следовательно, \[ {\mathbf{X}\left( 0 \right) = \left( {\begin{array}{*{20}{c}} {{x_{10}}}\\ {{x_{20}}} \end{array}} \right) = {A_1}{\mathbf{H}_1} + {A_2}{\mathbf{H}_2},}\;\; {\Rightarrow \left\{ {\begin{array}{*{20}{l}} {{A_1}{H_{11}} + {A_2}{H_{12}} = {x_{10}}}\\ {{A_1}{H_{21}} + {A_2}{H_{22}} = {x_{20}}} \end{array}} \right..} \] Эту алгебраическую систему можно решить по формулам Крамера: \[ {\Delta = \left| {\begin{array}{*{20}{c}} {{H_{11}}}&{{H_{12}}}\\ {{H_{21}}}&{{H_{22}}} \end{array}} \right| = {H_{11}}{H_{22}} - {H_{12}}{H_{21}},}\;\;\; {{\Delta _1} = \left| {\begin{array}{*{20}{c}} {{x_{10}}}&{{H_{12}}}\\ {{x_{20}}}&{{H_{22}}} \end{array}} \right| = {x_{10}}{H_{22}} - {x_{20}}{H_{12}},}\;\;\; {{\Delta _2} = \left| {\begin{array}{*{20}{c}} {{H_{11}}}&{{x_{10}}}\\ {{H_{21}}}&{{x_{20}}} \end{array}} \right| = {x_{20}}{H_{11}} - {x_{10}}{H_{21}},} \] \[ {\Rightarrow {A_1} = \frac{{{\Delta _1}}}{\Delta } = \frac{{{x_{10}}{H_{22}} - {x_{20}}{H_{12}}}}{{{H_{11}}{H_{22}} - {H_{12}}{H_{21}}}},}\;\;\; {{A_2} = \frac{{{\Delta _2}}}{\Delta } = \frac{{{x_{20}}{H_{11}} - {x_{10}}{H_{21}}}}{{{H_{11}}{H_{22}} - {H_{12}}{H_{21}}}}.} \] Итак, при начальных условиях \[\mathbf{X}\left( 0 \right) = \left( {\begin{array}{*{20}{c}} {{x_{10}}}\\ {{x_{20}}} \end{array}} \right),\;\;\mathbf{\dot X}\left( 0 \right) = \left( {\begin{array}{*{20}{c}} 0\\ 0 \end{array}} \right)\] получаем следующую формулу общего решения: \[ {\mathbf{X}\left( t \right) = \left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)}\\ {{x_2}\left( t \right)} \end{array}} \right) } = {{A_1}\cos \left( {{\omega _1}t} \right){\mathbf{H}_1} } + {{A_2}\cos \left( {{\omega _2}t} \right){\mathbf{H}_2},} \] где постоянные \({A_1},\) \({A_2}\) равны \[ {{A_1} = \frac{{{x_{10}}{H_{22}} - {x_{20}}{H_{12}}}}{{{H_{11}}{H_{22}} - {H_{12}}{H_{21}}}},}\;\;\; {{A_2} = \frac{{{x_{20}}{H_{11}} - {x_{10}}{H_{21}}}}{{{H_{11}}{H_{22}} - {H_{12}}{H_{21}}}},} \] а собственные векторы и собственные частоты выражаются через отношение масс \(\mu,\) массу второго тела \({m_2}\) и коэффициент жесткости пружин \(k\) по приведенным выше формулам. Полученные выражения значительно упрощаются, когда массы обоих тел одинаковы. Полагая \(\mu = 1,\) получаем следующие формулы (при тех же самых начальных условиях): \[ {\mathbf{X}\left( t \right) = \left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)}\\ {{x_2}\left( t \right)} \end{array}} \right) } = {{A_1}\cos \left( {{\omega _1}t} \right){\mathbf{H}_1} } + {{A_2}\cos \left( {{\omega _2}t} \right){\mathbf{H}_2},\;\;\text{где}} \] \[ {{\omega _1} = \sqrt {\frac{{3k}}{m}} ,\;\;{\omega _2} = \sqrt {\frac{k}{m}} ,}\;\; {{\mathbf{H}_1} = \left( {\begin{array}{*{20}{c}} {{H_{11}}}\\ {{H_{12}}} \end{array}} \right) = \left( {\begin{array}{*{20}{r}} 1\\ { - 1} \end{array}} \right),}\;\; {{\mathbf{H}_2} = \left( {\begin{array}{*{20}{c}} {{H_{12}}}\\ {{H_{22}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 1\\ 1 \end{array}} \right),}\;\; {{A_1} = \frac{{{x_{10}} - {x_{20}}}}{2},\;\;{A_2} = \frac{{{x_{10}} + {x_{20}}}}{2}.} \] Следовательно, в случае одинаковых масс и одинаковых коэффициентов жесткости законы движения тел определяются соотношениями: \[\left\{ \begin{array}{l} {x_1}\left( t \right) = \frac{{{x_{10}} + {x_{20}}}}{2}\cos \left( {\sqrt {\frac{k}{m}} t} \right) + \frac{{{x_{10}} - {x_{20}}}}{2}\cos \left( {\sqrt {\frac{{3k}}{m}} t} \right)\\ {x_2}\left( t \right) = \frac{{{x_{10}} + {x_{20}}}}{2}\cos \left( {\sqrt {\frac{k}{m}} t} \right) - \frac{{{x_{10}} - {x_{20}}}}{2}\cos \left( {\sqrt {\frac{{3k}}{m}} t} \right) \end{array} \right..\] В начале web-страницы представлена анимация, демонстрирующая характер колебаний тел, соединенных пружинами, при различных параметрах системы \(\mu,\) \(k\) и начальных смещениях \({x_{10}},\) \({x_{20}}.\) В модели принято значение \({m_2} = 2\,\text{кг}.\) Коэффициент жесткости \(k\) измеряется в \(\large\frac{\text{Н}}{\text{м}}\normalsize.\) Смещения грузов показаны в сантиметрах в масштабе \(1\,\text{см} = 1\,\text{пиксель}\) (график имеет масштаб \(1\,\text{см} = 3\,\text{пикселя}.\)) Видно, что в системе наблюдаются биения, при которых энергия циклически перераспределяется от одного тела к другому. При близких начальных смещениях одного знака грузы двигаются синфазно. И наоборот, при противоположных смещениях движение происходит в противофазе. Системы тел и пружин являются физической основой при моделировании и решении многих инженерных задач. Такого рода модели используются при проектировании строительных конструкций или, например, при разработке спортивной одежды. Разумеется, в реальных ситуациях система уравнений может быть гораздо более сложной. |
||||||